Bobette must find a and extinguish a lit candle in a model home of 2,5 by 2,5 meters with four rooms. This robot must be able to navigate through an environment of known dimensions. It can use such information as distance to walls and white lines at door entrance to orient itself in the house. A digital compass may also be used to figure out the direction of the robot and possibly map the different rooms. The robot is equipped with several sensors such as infrared short range distance sensors, ultrasonic long range distance sensor, infrared sensors to detect white lines, flame detector, etc.
Bobette is an autonomous robot. Once activated, it does not require any human intervention. It uses the information provided by its sensors to navigate into its environment.
Bobette controls its two motors independently which allows it to steer itself in any direction. It can spin on itself by turning one wheel in one direction and the other wheel in the other direction at the same speed. To steer right, Bobette turns both motors forward, but activates the left motor faster than the right motor: the higher the difference between the speed of two motors, the sharper the angle of turn.
The program that controls Bobette is transferred from the PC to the microcontroller using an RS-232 interface (COM serial port). The program is "flashed" into memory, i.e. it is written in the microcontroller permanent memory, which is a special type of memory called flash memory. The microcontroller's flash memory is fairly small (8 Kb), so the program has to be fairly simple in complexity.
For its first version, Bobette used a finite state machine to navigate through the different rooms. Different landmarks were identified and the robot moved from one point to the other. There were also some parallel routines that performed a first order obstacle avoidance algorithm.
Here is a summary of the components used on the first version of Bobette:
| Chassis | Old VCR frame used to form the base of the robot. Two 25 cm diameter discs were cut off the metal frame. |
| Two 12V 100 RPM Hsiang Neng motors | |
| 12V 4 Ah sealed lead acid battery | |
| Two wheels with a 7 cm diameter coming from an old Capsella kit | |
| One rollerball wheel placed in front | |
| Recycled CDROM reader motor and toy propeller fan to blow out candle | |
| Switch | |
| Nuts and bolts | |
| Meccano pieces | |
| Sensors | Vector 2X digital compass |
| Three Sharp GP2D12 infrared distance sensors | |
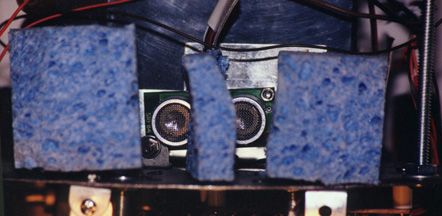
| Advantech SRF04 ultrasonic distance sensor | |
| Two QRB1114 infrared sensors to detect color variations on the floor | |
| OP805SL phototransitor to detect flame (by light intensity) | |
| Two thermistors to detect flame (by heat) | |
| Hitachi HD44780 LCD 2 rows X 40 characters | |
| Three pushbuttons (can be used as bumpers) | |
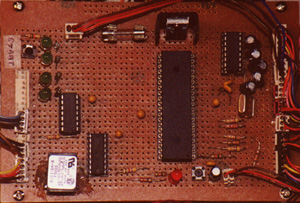
| Main board | One circuit board (15 cm X 10 cm) |
| 5V 7805 1A voltage regulator | |
| PIC16F877 4 MHz microcontroller | |
| 4 MHz crystal | |
| L293D H-bridge | |
| MAX232 RS232 Interface | |
| SN74LS05 hex inverter | |
| Two push buttons | |
| A dozen capacitors | |
| A dozen resistances | |
| Red LED to show that the baord is powered on | |
| 4A fuse | |
| Phone plug (used as a RS-232 interface for serial communication between PC and PC) | |
| A dozen connectors to hook up sensors to the main board | |
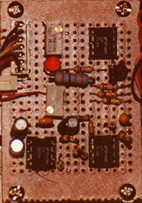
| Environmental board | Two LM741 opamp (one for temperature and one for sound detection) |
| 567 tone decoder (sound detector) | |
| Two 100K potentiometers | |
| LED to indicate detection of heat source | |
| 1N4004 diode | |
| BS170 MOSFET to activate fan motor | |
| Half a dozen capacitors | |
| Ten resistance | |
| Two connectors | |
| 2-wire LCD interface | SN74LS174 Quad flip-flop memory |
| 20K potentiometer | |
| Diode | |
| Capacitor | |
| 1K resistance |
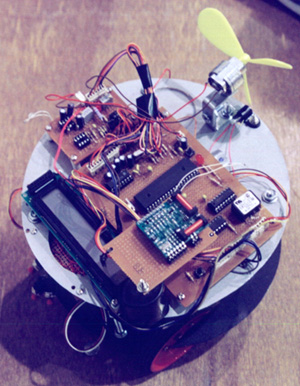
Bobette Details
|
|
| |
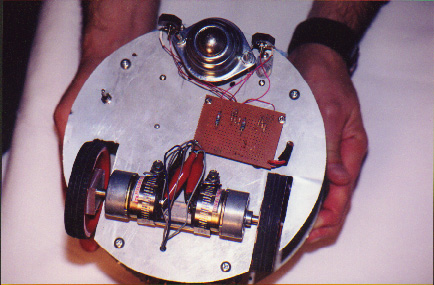
Bobette Bottom View
Bobette participated in the 2002 Trinity College competition in Connecticut in April 2002. It was able to pass the qualification in the senior division. Only fifty of the hundred robots registered succeeded in the qualifications. To qualify, each team had to demonstrate that its robot could succeed blowing out a candle in any of the room of the model home.

In the competition, each robot had three runs. Bobette wasn't able to extinguish the candle in any of its three runs. In its first two runs, the candle was placed in the furthest room of the house. Bobette was able to visit each of the four rooms, but hit a wall before being able to see and/or detect the candle in the final room. In the third run, Bobette hit a wall head on halfway and wasn't able to resume its course afterward. Bobette ended thirty-first overall.
Here is a list of changes that were made to the robot in preparation for the ECRG competition held in Toronto in October 2002:
The results of this competition were much better than those at Trinity. Calibration of the robot was much easier than in Hartford. I had to tune the light intensity sensor (moving it up a couple of inches) and adjust the light intensity sensor and ground sensor thresholds, then fix a couple of small bugs and the robot was ready to roll. There were still some navigation problems that prevented the robot to locate the candle from time to time that I will need to fix before upcoming trials. Also, I had some problems with the light intensity sensor after I moved it up because the fan was blocking its field of view sometimes.
On the first day of the competition, Bobette was able to extinguish the candle flame on its first attempt. On its second attempt, Bobette went to the room where the candle was lit, but didn't find the candle. Either the light threshold was too low or the fan blocked the light intensity sensor. On the second day, on its third and final run, Bobette miserably crashed into a wall on its way into the first room (where the candle was). It could not move any further and thus did not succeed in extiguishing the fire.
Bobette finished fourth amongst the six robots that entered the competition.
Bobette was outstanding in this event. The qualification was much more difficult than the previous years, but this time around, Bobette qualified in its first attempt. From the sixty entries in the senior category, only thirty-two qualified for the event. The entries that qualified seemed stronger than the year before. In the actual competition, Bobette was able to detect and blow out the candle on its second run (in the most difficult room). In its third attempt, it was able to find the candle, but was never able to put it out because of a reflection problem (it focused on the reflection of the candle and could not position the fan to effciently blow away the candle). There is still more work to do on navigation, but Bobette behaves well in the maze. Bobette reached 23rd place in its category and was probably the lowest cost entry in the competition.
Notwithstanding the sad break in of my car, in which I lost all my tools and components, this event would have been a resounding success.
Lack of time has delayed upgrades to Bobette, but I shall soon resume its quest to stardom!
To reach me, send an email to: martin.dubuc@rogers.com.
Last updated: March 14, 2004