
Ce robot combat un ou plusieurs robots dans une arène d'environ 8 mètres par 8 mètres. Chaque robot est muni d'un fusil à balle de peinture. Le but est d'atteindre le/les robot(s) adverse(s) le plus souvent possible dans un laps de temps dèterminé.
angel-eyes est un projet d'équipe pour lequel ont participé: Aaron, Guy, Mordechai, Attila, Chris et moi-même. Attila et Chris se sont chargés de la mécanique. Aaron a contribué à l'élaboration des plaques électroniques. Mordechai a conçu le module de détection par laser. Mordechai et Guy ont aidé à l'assemblage des diverses composantes. Je me suis chargé de la programmation.
La première compétition a eu lieu en novembre 2001. Le succès fut mitigé car notre méthode de détection n'était pas au point. Les deux robots ne pouvaient combattre en même temps. Nous avons donc fait divers essais dans lesquels chaque robot était prédateur et puis proie à tour de rôle. Par contre, nous avons été impressionnés de voir qu'à ce premier essai, les robots ont chacun été capables d'atteindre leur cible plusieurs fois. Plusieurs taches de peintures "décoraient" la carapace des robots à la fin de la compétition!
Afin de détecter l'autre robot, des récepteurs à infrarouges étaient disposés à divers endroits sur chaque robot. Chaque robot avaient aussi un nombre d'émetteurs infrarouge qui signalaient leur identité de façon lumineuse.
La deuxième version d'angel-eyes utilise un module de détection au laser pour détecter la présence des robots adverses. Le principe de fonctionnement est le suivant: des bandes réfléchissantes sont apposées sur chacun des robots. Une faisceau laser (provenant du pointeur laser bon marché) est é de façon circulaire alentours du robot. Lorsque le rayon frappe la surface réfléchissante, elle revient vers le robot émetteur. Un phototransistor surveille la présence de ce faisceau. Cette méthode est prometteuse mais n'est pas encore tout à fait au point.
Albert van den Haan a aussi trouvé un algorithme qui permet d'encoder le signal infrarouge à l'aide de transformations mathématiques basées sur les nombres premiers. Grâce à cet algorithme, il est possible de prévenir les collision entre les signaux de plusieurs robots.
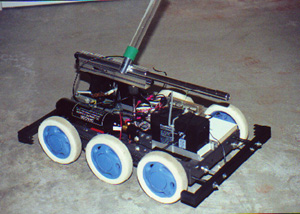
Evolution d'angel-eyes
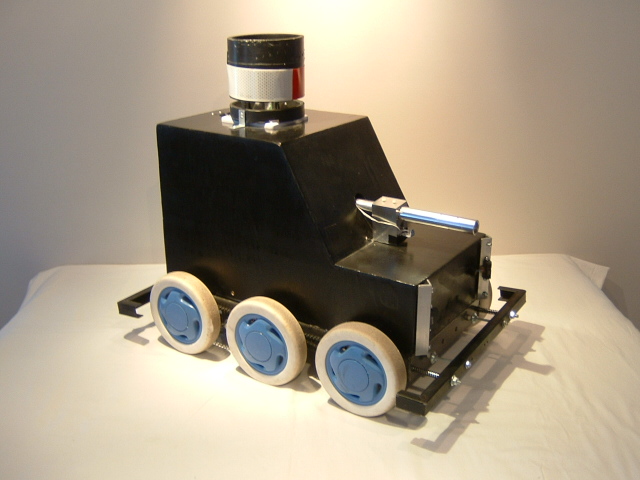
Le tableau suivant montre lévolution d'angel-eyes au fil des mois. Le première photo a été prise au moment des "premiers pas" d'angel-eyes. angel-eyes n'avait alors pas de carapace. La deuxième photo a été prise lors de la première compétition. La carapace d'angel-eyes à ce moment était faite de plexiglass transparent. La troisième photo montre la version actuelle d'angel-eyes. Les senseurs à infrarouge ont été remplacé par le module de détection au laser. La carapace a été remplacé par un matériel plus léger et plus facilement maléable (bois).
|
|
|
|
|
|
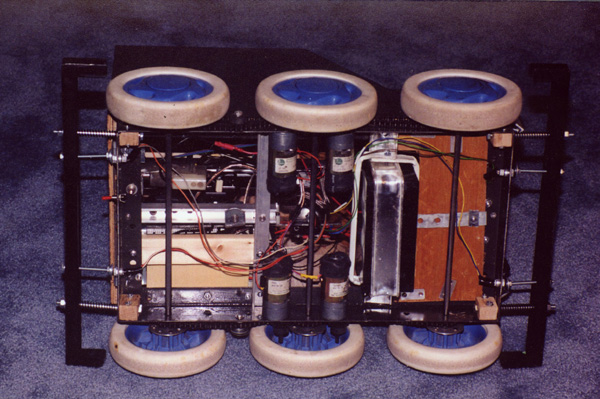
Vues détaillées d'angel-eyes
|
|
|
|
|
|
|
|
|
|
| |
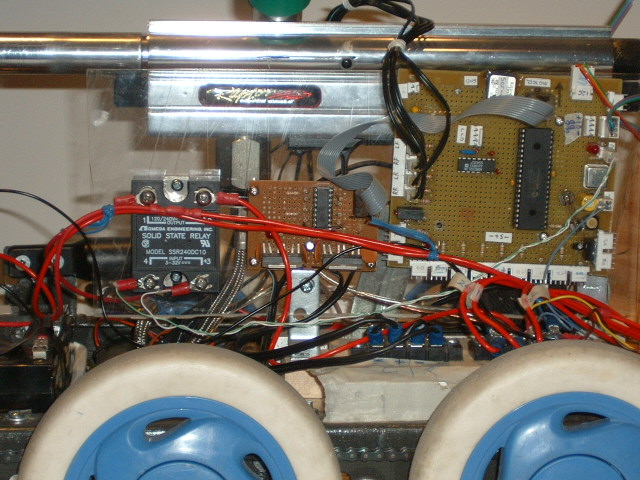
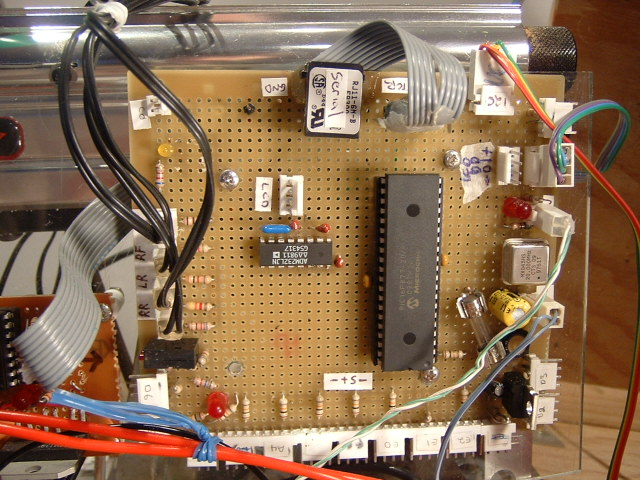
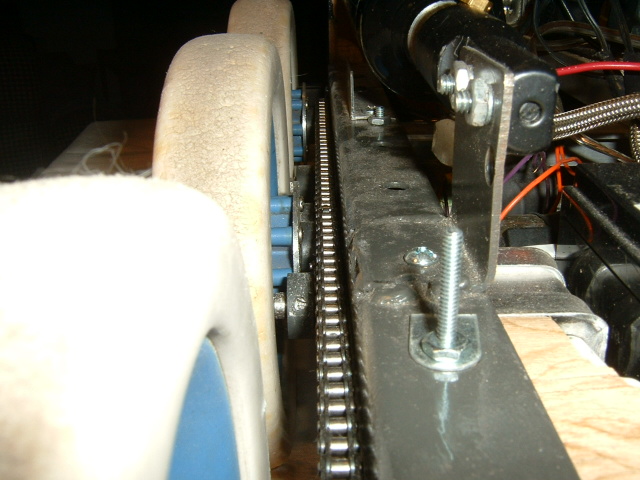
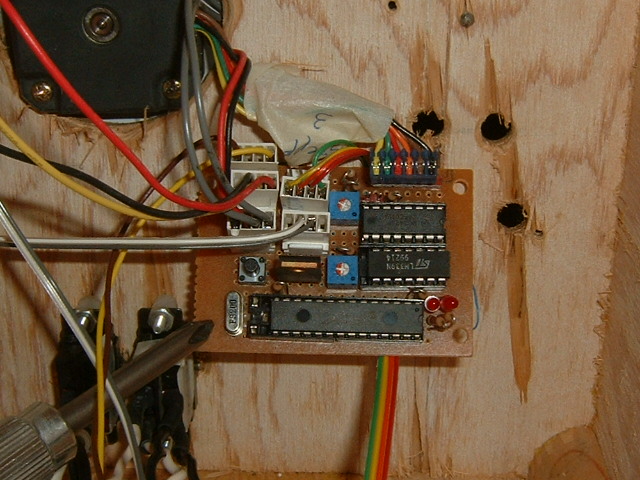
Le cerveau d'angel-eyes est le microcontrôleur PIC16877 roulant à une fréquence de 20 MHz. angel-eyes est alimenté par deux batteries plomb étanche de 12V rechargeables. angel-eyes utilise quatre moteurs de 24V pour se propulser (deux de chaque côté). Chaque paire de moteur est connectée à des chaînes et des engrenages qui font tourner les trois roues au même rythme. Chaque paire de moteur peut être controlée indépendemment (traction différentielle). Le contrôleur du moteur a été conçu sur une plaque indépendante. Il utilise le circuit intégré pont H LMD18200 de National Semiconductor qui peut supporter une charge de 3A et 55V. Un LMD18200 est utilisé pour chaque paire de moteurs.
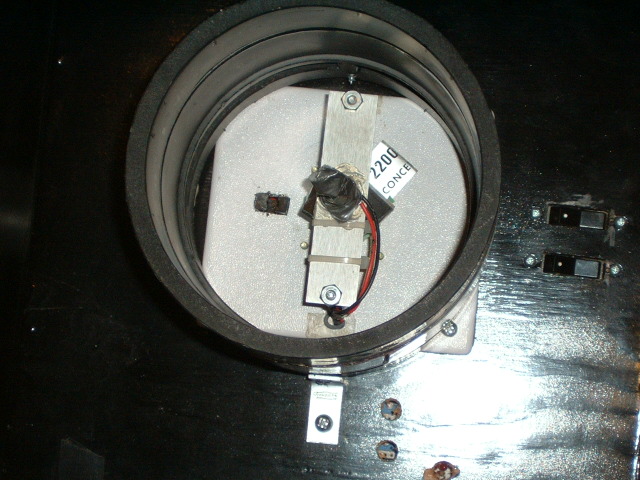
La première version d'angel-eyes utilisait un module de détection à ultrason pour détecter les obstacles. Ce module a été remplacé par deux senseurs à infrarouge Sharp GP2D12. Ces senseurs peuvent détecter des obstacles jusqu'à 80 centimètres du robot. angel-eyes utilise aussi deux pare-chocs (avant et arrière) dans le cas où les obstacles ne seraient pas détecter par les senseurs GP2D12. Pour détecter les cibles, angel-eyes utilise deux pointeurs laser (un au niveau du fusil pour le tir de précision et un autre sur le toit pour la détection de la cible). Des phototransitors détectent le faisceau réfléchi sur les robots adverses. Le module de détection laser sur le toit est controlé à l'aide d'une interface I2C. Le faisceau laser dans le module de détection laser tourne à l'aide d'un moteur pas-à-pas.
La gachette du fusil est actionnée à l'aide d'un relai qui active un solénoïde. Le solénoïde a été recyclé du système d'ouverture de coffre arrière d'une automobile (qui ne s'ouvre plus à distance maintenant!).
Il y a un port sur la plaque de commande pour attacher un afficheur LCD qui affiche l'état des divers senseurs et fournit de l'information sur le comportement du robot.
Dernière mise-à-jour: Le 3 octobre 2004